

Introducing A Hypothetical Idea of Voluntary Postural Control
for Better Movement and Performance
Paul Norikazu Aoki
Miwaza Lesson
3-5-5 Ebisu, Shibuyaku, Tokyo, 150-0013 Japan
Email: paulaoki@alexlesson.com
April 29, 2015 (Revised[1])
1. Introduction
When describing the body movements of others, phrases such as “You are making your body stiff” or “You are making your muscles tense” are not uncommon. “Stiffness” or “tension” here, in this context, refers to muscular tension, or more specifically to the degree of muscular tension being in excess. In other words, an executant (a person who does an action) exerts unnecessary muscular tension in movements and performances. Some individuals when alerted to having “stiff” or “tense” state are able to ease any unnecessary muscular tension. On the other hand, there are individuals whom, of their own accord, cannot ease the muscular tension exerted.
I intend to state various ideas here, and my ideas come down to how unnecessary muscular tension happens, how it affects our body and movement, and how we can avoid it. I emphasize here that it is desirable for us not to exert unnecessary muscular tension. This is because excess muscular tension imposes both limitations on function and extra burden on the body. Therefore, by not unnecessarily increasing muscular tension, we are able to make our posture, movement, breathing, and vocalizations advantageous. We also can improve performance activities, such as playing musical instruments, singing, dance, sports, martial arts, and communication. Furthermore, we are able to reduce the burden exerted on our body during work or housework, and we can improve the condition of our health by relieving physical pain or discomfort, and preventing the occurrence of further ailment.
Here I introduce a hypothetical idea about an advantageous way of using our body, which is the way that we practice an aimed activity with minimum muscular tension. This idea has been verified only through my practice of instructing posture and movement to clients. I have found that our way of maintaining a body position, such as a standing or sitting position, in other words “postural control”, is strongly related to the degree of muscular tension. Furthermore, how we are conscious of own body and movement, such as attention and intention is also concerned.[2] In the end, I describe the difference between the way I recommend for the use of our body and the way of Alexander technique. I also indicate some points for further improvement in the instructions of Alexander technique.
2. Influences by the Way of Maintaining Body Position
While we stay up, we always support our own body. This means that we perform the activity of maintaining a specific body position such as standing or sitting. Through my experience of instructing posture and movement, based on the Alexander technique, I have become aware that a certain percentage of people adopt a disadvantageous way of maintaining their body position. Such people exert unnecessary muscular tension, which is an extra burden on the body and can impose limitations on function. These types of individuals are more likely to be susceptible to chronic pain, or may experience deteriorating posture, movement, breathing, and vocalizations, which, in turn, can deteriorate their appearance and performance of various activities.
The reason why a certain percentage of people adopt a disadvantageous way of maintaining a body position is because our way of maintaining body position can easily become a disadvantageous one if we are not conscious as to how we maintain our body position, and do not try to manage it voluntarily. When people carry out various activities, many will not notice that they are supporting their own body, so they will not pay attention to their own way of maintaining their body position. When we maintain our body position without attention and management, the way of it becomes impromptu depending on inadequate or excessive muscle tension. There are multiple impromptu coping actions for maintaining body position, for either case of standstill and movement.
3. Disadvantageous Ways of Maintaining Body Position
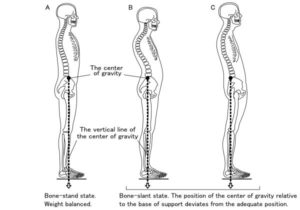
There are two disadvantageous ways of maintaining body position while standing still. One such way is referred to as “Bone-slant state” which is a state that some joints of the axial skeleton are bent in the either flexion or hyperextension direction(Figure 1, B and C)[3]. I refer here to an executant’s attitude of allowing this state as “Allowing bone-slant”. When an executant has the attitude of Allowing bone-slant and maintains their body position, the executant can be easily susceptible towards the following three conditions: the pelvis is slid forward and tilted backward (pelvic slide retroversion), the spine is flexed (spine flexion), and the head is projected forward and the cervical spine is extended (head projection and cervical spine extension).
The other is the way that an executant allows the position of the center of gravity of the body relative to the base of support[4] to deviate from the appropriate position (Figure 1, B and C). I refer here to the executant’s attitude of maintaining body position in this way as “Allowing imbalance”. When an executant has the attitude of Allowing imbalance, the executant will make their position of the center of gravity relative to the base of support deviate backward, which means that the executant will distribute his weight more towards in a backward manner relative to the appropriate distribution.
An executant who is either Allowing bone-slant or Allowing imbalance, or both, is going to use shorter local muscles, the anterior muscles of the body such as the abdominal muscles and the quadriceps, and ligaments more to support the body in a particular state. This executant’s way of maintaining body position will be an ex-post facto response without managing it adequately beforehand, and I refer here to this coping action as “Ex-post facto support”.

If an executant is in a state of either Allowing bone-slant or Allowing imbalance or both, and adopting the Ex-post facto support, the executant will increase the burden on their muscles, ligaments, and tissues in between joints such as the intervertebral disk, and may also experience limitations in functions such as breathing and vocalization, as well as, functions of internal organs. Thus, it can be said that these ways of maintaining body position are disadvantageous.
The reasons why a certain percentage of people succumb to this way of maintaining body position are as follows. First, the executant is likely to experience it as being “easy”, or “without effort”, or “comfortable” when in a state of the Ex-post facto support. This is because the Ex-post facto support is the way in which the executant seeks to reduce the burden of the posterior muscles of the body, which are supposed to keep working to maintain body position, by using the anterior muscles of the body through tilting the whole body or the upper body backward instead. In addition to this, the executant can reduce the burden on muscles by using ligament tension more through flexing or extending the joints. Second, the Ex-post facto support is, in some way, a simplified coping action as the executant restricts the direction of tilting both the bones and body to backward, and supports their own body with a constant pattern of muscular tension. Another reason that also makes this action simple is that the executant just relies on muscular tension to support the body without managing the balance of the body.
The executant who is applying the Ex-post facto support, being either in the Allowing bone-slant or Allowing imbalance state, as a result, supports their body by giving priority to easiness and simplicity over efficiency and effectiveness of the activity of maintaining body position. Therefore, it can be said that the executant supports their body in an impromptu way, and the Ex-post facto support becomes an impromptu way of maintaining body position.
4. Disadvantageous Way in Body Movement
A disadvantageous way of maintaining body position at the time of movement is the way that an executant places excess muscular tension on the abdominal and the cervical muscles.
At the time of movement, while we move a part of the body by the contraction of muscles, our axial skeleton simultaneously is going to receive traction forces to be moved by the muscles’ contraction. Furthermore, our axial skeleton is going to receive other forces to be moved through receiving reaction forces of the body action. Thus, it is necessary for an executant to support the axial skeleton and stabilize it for maintaining body position at the time of movement. It becomes an action of stabilizing the body when an executant makes the muscular tension of the abdominal muscles and the cervical muscles excess.
It is called co-contraction when an executant makes both the agonist and antagonist muscles simultaneously contract to some degree. In this way of maintaining body position an executant practices stabilizing their axial skeleton by keeping it from moving with excess co-contraction of both the muscles in the posterior side of the body and its antagonist muscles in the anterior side of the body. The abdominal muscles and the anterior cervical muscles are the representative factors of the anterior muscles, and these muscles get involved excessively in this activity of stabilizing the body. I call this way of stabilizing the body “Excess co-contraction braking” (Figure 2)[5].

The executant who applies the Excess co-contraction braking is able to support the axial skeleton firmly, resisting the forces to be moved such as traction force from muscle contraction. In this way, the executant succeeds to support their body at the time of movement. However, the degree of muscular tension in the Excess co-contraction braking becomes excess. This means that the executant could have supported their body without adding further muscular tension. In other words, the executant supports their body too firmly. The muscular tension of the executant’s body becomes strong as a result, and the executant may feel stiff or inflexible in movement. In addition, the tension of the abdominal muscles due to the Excess co-contraction braking limits the executant’s breathing. This is because the abdominal muscles are a relative factor in breathing function, and strongly relate to our respiratory volume. Thus, it can be said that the Excess co-contraction braking is a disadvantageous way of maintaining body position.
The reason why an executant adopts the Excess co-contraction braking at the time of movement is because they have the following tendencies:
- Relying on the use of the anterior muscles, including the abdominal muscles, to support the body by adopting the Ex-post facto support.
- Making the speed of movement fast enough to require excess muscular tension for stabilizing the body.
- Applying the Valsalva maneuver, which involves tension of the abdominal muscles and forced closure of the larynx.
People can easily acquire these tendencies when they do not pay attention to how to support their own body. Thus, a certain percentage of people adopt the Excess co-contraction braking. In addition, the Excess co-contraction braking is a simple coping action as the executant only intensifies muscular tension without adjusting the degree of muscular tension. It is also a versatile coping action as it can also be used for displacing the position of the center of gravity of the body at the time of postural change during movement. Because it is simple and versatile, the Excess co-contraction braking becomes a convenient coping action for the executant who does not pay attention to maintaining body position.
The executant who is applying the Excess co-contraction braking, as a result, supports their body by giving priority to simplicity and versatility over efficiency and effectiveness of the activity of maintaining body position. Therefore, the Excess co-contraction braking becomes an impromptu way for maintaining body position, similar to the Ex-post facto support.
When an executant adopts the Excess co-contraction braking, the executant easily triggers pelvic slide retroversion, spine flexion, head projection, and cervical spine extension a split second before exerting force or moving the body. This is because the manner of Allowing bone-slant is often involved in the executant’s body movement.
5. Impromptu Way and its Problems
There are some people who adopt both the Ex-post facto support at the time of standstill and the Excess co-contraction braking at the time of movement. Because both of these represent impromptu coping actions for maintaining body position, I call the aggregated actions of the Ex-post facto support and the Excess co-contraction braking altogether “Impromptu safety”. Impromptu safety is not just the name of the coping action but also defined here as the expression of the executant’s attitude in adopting these actions. It is the attitude without attention and management of their way of maintaining body position. If an executant is in the attitude of Impromptu safety and adopts such actions, the executant will increase the burden on their body, limit body functions, and make their performance through movement and vocalization deteriorate.
While this is an inherent problem in and of itself, it can become ingrained through: that the executant builds the automatic program of brain to practice Impromptu safety and manifests it as a habitual pattern, and that the executant becomes accustomed to strong muscular tension and is desensitized to it because of its repetition. The following are the examples of patterns that can worsen the executant’s condition:
- A person who assumes a pattern of Impromptu safety may adopt the Excess co-contraction braking for maintaining body position at the time of just standstill, rendering muscular tension in The Excess co-contraction braking is an action for the time of movement, but this is the reaction that the person also adopts it at the time of standstill when it is originally unnecessary.
- A person who assumes a pattern of Impromptu safety may continue in this state with strong muscular tension when in supine position, as if trying to support the body with effort, though it is not necessary for a person to support the body with effort when insupine
- A person who assumes a pattern of Impromptu safety may excessively tense the muscles around their shoulder blade even when the person is not using their arms or holding/carryingWhile this is the reaction required when a person uses their arm, the person adopts this reaction unconsciously when he/she does not use their arms.
- A person who assumes a pattern of Impromptu safety may position their elbows and shoulders higher than needed with strong muscular tension when the person moves only their forearms.
The person who has a fixed pattern of Impromptu safety may therefore adopt such unnecessary reactions. In such cases, the person is going to extend the strong muscular tension state, and increase the burden on their body. For these reasons, a person with a fixed pattern of Impromptu safety tends to suffer from stiffness of the shoulder or neck, and chronic pain, such as lower back pain. In addition, this condition tends to cause symptoms such as inflammation of a tendon sheath, thorax exit syndrome, herniated intervertebral disk, and sciatic neuralgia.
As to the influence of this on an executant’s movement or activity, a person with Impromptu safety tends to deteriorate their performance with regards to movement, vocalization, or forced breathing like playing wind instruments by: not being able to exert the maximum force that he/she can, becoming easily tired, being easy to delay exerting a force from an intentional timing, and exhibiting stiffness in their movements. In addition, the executant may become accustomed to shallow breathing often withholding breath. This may also affect the executant’s usual psychological state as it may be hard to them calm down, for instance when performing in public.
6. Difficulties in Correction
With regards to Impromptu safety, both the automatic response of the brain, and desensitization to excess muscular tension, render the executant’s correction of the use of their body difficult. Some of the difficulty is associated with the individual’s suppressed ability to sense and relax muscle tension, as well as, getting feeling of wrongness or discomfort from the state of relaxed muscular tension that is in fact ideal.
The force of gravity acts on our body; however, a person in a state of Impromptu safety tends to lose the sense that he/she supports the body by resisting the force of gravity with anti-gravity muscles, such as the erector spinae, and by relaxing the tension in the abdominal and cervical muscles. We are able to sense this when we are in a state of balance in terms of body position, and when adopting our natural postural control with minimum muscular tension.
Even though persons in a state of Impromptu safety correct their posture to the one possible to relax muscular tension, those who are accustomed to a sense of supporting the body with strong muscular tension will have difficulty in relaxing muscular tension as a result of them having a re-programed sense of what is adequate. Such a person tends to associate their sense of stability with strong muscular tension. Those who aim to adopt the advantageous way need to ease their muscular tension, but they will experience a feeling of wrongness or discomfort such as instability or insecurity during the relaxed state of muscular tension.
In addition, at the time of movement the person adopting Impromptu safety tends to attempt to get a sense of the muscular tension, both within the trunk of the body, and in the limbs close to the trunk (ex. the muscles located in the shoulder at the time of an arm movement). I presume this movement intention of the executant to be expressed as “move by using muscles and joints” if as it were in the words of the executant. This movement intention can be established both subconsciously and consciously. If an executant carries out a movement with this movement intention, the executant will prompt excess muscular tension, even though other factors in the executant’s way of maintaining body position are adequate.
The correction of body use by a person who adopts Impromptu safety is possible. This is because we use the skeletal muscles for the maintenance of body position, and these are voluntary muscles such that we can use them voluntarily and change our way of supporting the body intentionally. In addition, the brain has the characteristic of plasticity, such that we are able to revise the automatic program built into it. However, this means that activation of the cognitive processes is required for correction. In other words, it is necessary for the person to alter their way of consciousness for body use.
The concrete way for an executant to become conscious of body use, which I recommend, are as follows: 1) notice the condition of their own body use; 2) think about supporting their body; 3) intend on the advantageous way of using the body by giving oneself instructions. If a person in a state of Impromptu safety is able to manage their way of consciousness, as adequately as this, they will be able to overcome such difficulties, and shift to the more advantageous way of body use.
7. Advantageous Way of Postural Control
A person who suffers from problems of the body and performance, and is willing to improve them should correct their way of maintaining body position to an advantageous one and put it into practice. I describe below an advantageous way of maintaining body position.
At the time of standstill, an advantageous way of maintaining body position is when an executant assumes the “Bone-stand state” and locates their center of gravity at the appropriate position in relation to the base of support. I define the “Bone-stand state” as the state of the bones in the axial skeleton transmitting the load of the body to the articular surface of the bone adjacent below through the largest area of contact (Figure 3 depicts a schematic representation). It could be said that two bones adjoining each other in the axial skeleton joint through the largest area of contact, and the state of joint is in neither a flexion nor a hyperextension relation. I call the executant’s voluntary control of maintaining body position in this way “Bone-stand and weight-balanced control”, and it is abbreviated as “Bone weight control”.

If an executant practices the Bone weight control, they will achieve the ideal postural alignment described in kinesiology, and as depicted in Figure 1A. By being the ideal postural alignment with the Bone weight control, the executant is able to suppress the generation of couples of forces in the relationship of the bones in the axial skeleton as less as possible[6] (Figure 4 depicts a schematic representation). Thus, the executant can make the tension in muscles and ligaments minimum up to the degree that is just required to restrain the bones in the axial skeleton.

It can be said that the executant makes good use of the force of compression load exerted by one’s own weight, the bone reaction force, and the floor reaction force for the restraint of both the position and the angle of the bones in the axial skeleton. In other words, the executant uses the bones in the axial skeleton as “a tension rod” in a state of the Bone weight control (Figure 5). Just as a tension rod becomes stable by itself only by the pressure exerted on both ends of it when it is placed at the adequate angle, a bone in the axial skeleton when in a state of the Bone weight control become stable by pressure exerted from the top and the bottom of it, which are the load of one’s own weight and the reaction force from the bone adjacent below or the floor.

The executant, therefore, is able to support their own body with limited muscular tension using the anti-gravity muscles adequately in a state of the Bone weight control. The executant can reduce the burden on muscles, ligaments, and other connective tissues of the joints, which are susceptible to chronic pain and can cause troubles of the body. The executant can also relieve functional limitations such as breathing and vocalization by being in a state of the Bone weight control.
At the time of movement, the Bone weight control also becomes an advantageous way of maintaining body position. This is because the executant is able to move with minimum muscular tension through making minimum muscular tension in the activity of stabilizing the body.
With regards to the activity of stabilization during movement, an executant had better try to stabilize the own body based on the stop of support parts of the body. By doing so, the executant is able to stabilize the own body with less muscular tension through harnessing the friction force generated between the support parts and floor. The executant will be able to practice this by trying to load their own weight to the base of support through the whole contact surface of the support parts of the body. I call this way of stabilizing the body during movement “Place-weight base anchoring”. The Place-weight base anchoring becomes an advantageous way of stabilizing the body in comparison to the Excess co-contraction braking.
By applying both the Bone weight control and the Place-weight base anchoring, it can be said that the executant will be able to use muscular contraction efficiently to move. Thus, applying these postural controls, the executant may also become able to: exert the maximal force that they can, initiate their movement without a delay relative to an intentional timing, and exhibit easiness in movement, as well as, being less tired. Moreover, the executant may tend to experience their own movements as “light” or “requiring less effort”.
8. Principles and Points to Consider
An executant who aims to practice advantageous use of the body needs to pay attention to their own activity of maintaining body position, and the executant needs to intend on an advantageous use of the body, including maintaining body position. In other words, I recommend people not to be the attitude to allow disadvantageous condition with regards to supporting the body and respond it ex-post facto unconsciously but to be the attitude to manage the way of I call the executant’s attitude toward intending advantageous use of the body as “Intention advantageous”.
The principles for the person with Intension advantageous, that would make their use of the body advantageous, are described below. It also can be said that these principles are for one getting out of habitual pattern of Impromptu safety.
- Notice the state of the body, and intend to practice advantageous body use including the way of supporting the body.
- Intend on the Bone weight control for posture.
- Apply the Place-weight base anchoring for movement, and try not to adopt the Excess co-contraction braking.
- Have the intention of “Leading edge” for a movement. This is the way of intention that an executant decides on an edge, a particular point or area to be adequate for leading an objective movement, and intends to lead the edge when moving. This intention is for avoiding the movement intention “moving by using muscles and joints”.
- Keep control the position of the center of gravity of the body relative to the base of support appropriately with leg movements in case of postural changes during movement. In other words, keep balancing with leg and hip movement. By doing this, an executant can make their upper body involved in balancing activity as less as possible so that the executant can keep muscular tension in the upper body to a minimum and relieve functional limitations and burdens.
Points to consider, for the person with Intention advantageous to actually practice an advantageous use of the body, are the following:
- Consider support parts of the body, and control body position with the intention of placing the body weight on the support parts.
- Pay attention to the head, and make a movement intendingto “move as with the head”.
- Ensure the pelvis and the spine is in a Bone-stand state.
- Prevent the abdominal muscles and the cervical muscles from strong muscular tension and keep its muscular tension to a minimum as best as
- Consider that the arms are hanging. Drop the weight of the arms (or drop the shoulders are elbows) and get a sense of receiving a part of the weight at the sternum.
- Be aware of the state of breathing, and try not to cut down on breaths or to adopt the Valsalva maneuver. Had better breath out sufficiently when aware.
- Be aware of the speed of own movement, and try not to make the speed of movement too fast.
- Accept the feeling of wrongness or discomfortthat can accompany the change in body use.
9. Practicing the Advantageous Way
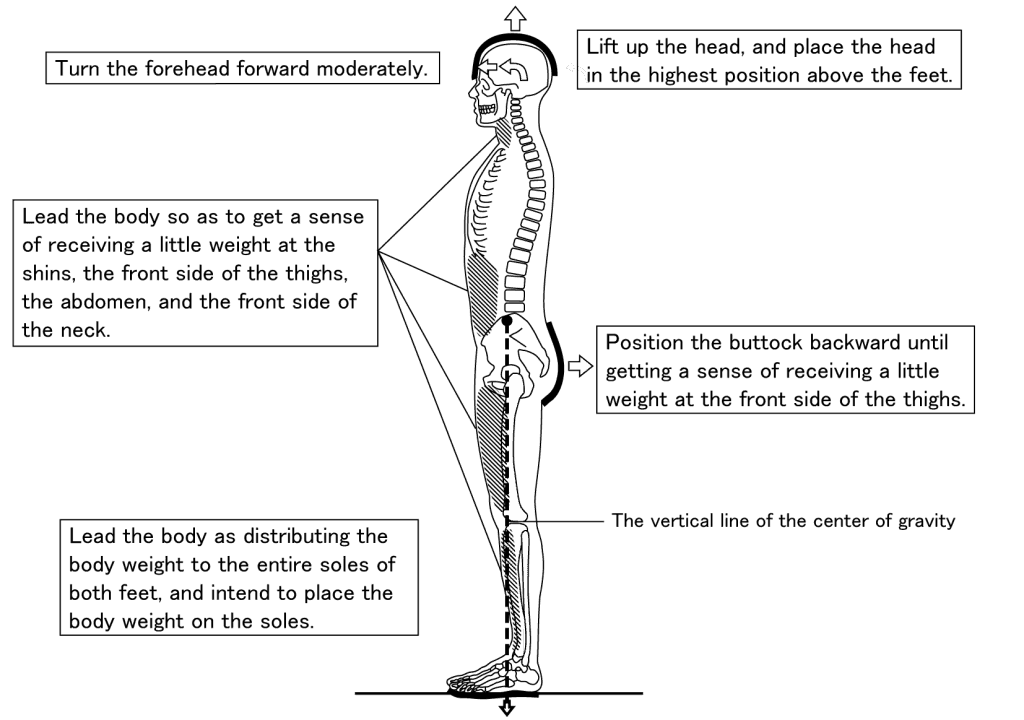
The recommended instructions for the person with Intention advantageous to practice the Bone weight control in a standing position are the following (Figure 6):
- Lift up the head, and place the head in the highest position above the feet. Turn the forehead forward moderately so that the face turns to the front.
- Lead the body as distributing the body weight to the entire soles of both feet, and intend to place the body weight on the soles.
- Position the buttock backward until getting a sense of receiving a little weight at the front side of the thighs. This is to ensure the pelvis is in a Bone-stand state.
- As a whole, consider that “there is a column-like support at the front side of the body”, and lead the body so as to get a sense of receiving a little weight at the shins, the front side of the thighs, the abdomen, and the front side of the neck.
- Check the state issuch that the front surface of the abdomen moves as if inflated and deflated when breathing, and also check the state is such that the head is ready to move independently from the trunk of the body. These are procedures for confirming whether muscular tensionsof the abdominal muscles and the cervical muscles are in excess or not.
An executant is able to lead the bones in the axial skeleton to conform to the Bone-stand state by controlling the position and the angle of their head and pelvis. By intending tothe executant will be able to locate the position of their center of gravity in relation to the base of support at the appropriate position. By doing so, the executant is able to make good use of their own weight for stability of both, the support parts (feet in this case), and the bones in the axial skeleton.
By assuming that “there is a column-like support at the front side of the body” and leading the body so as to get a sense of receiving a little weight at the front side of the body, the executant is able to promote minimum work of the anti-gravity muscles, such as the erector spinae and the biceps femoris. This is because the anti-gravity muscles are originally supposed to be used to support the body by reacting to the stimulus of moment of force generated when distributing weight to the front side.
These instructions are mostly based on our sensory appreciation, especially with regards to the body weight[7]. If the sensation of the body weight is appreciated with an objective standard[8], we will be able to use it to reproduce a state of the body. Figure 7 shows the recommended instructions to practice the Bone weight control in a sitting position.

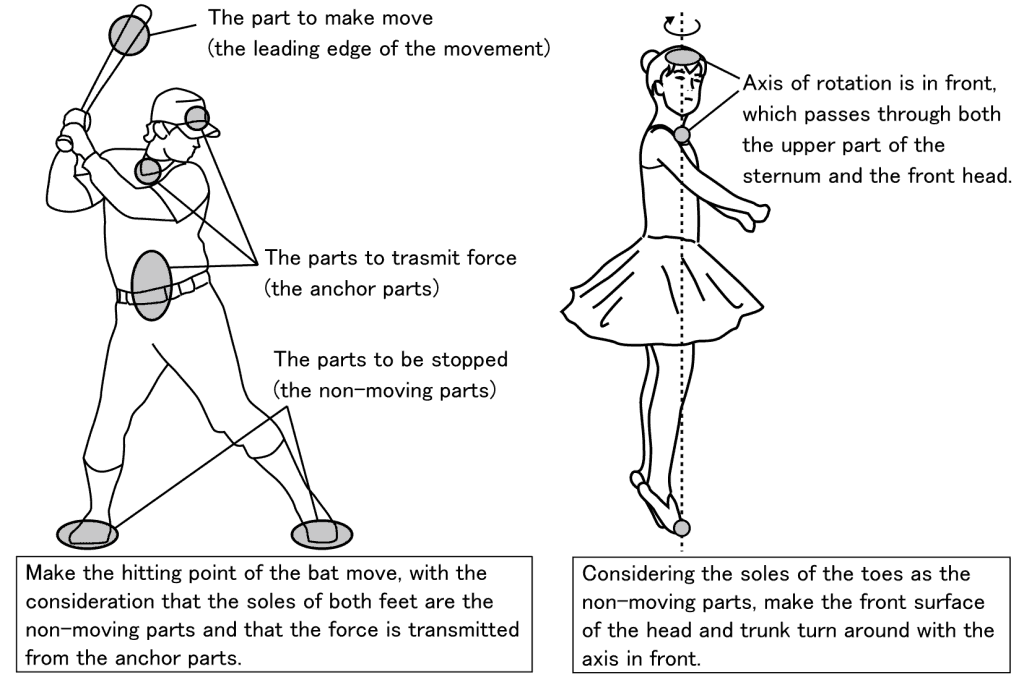
With regards to movement, a person with Intention advantageous had better move with the intention as “place their body weight on the support parts, and move with leading ‘the leading edge’ considering the support parts is kept stopping.” This intention is to practice the Place-weight base anchoring and Leading edge. The executant had better also check that the front surface of the abdomen moves as if inflated and deflated when breathing, and also check that the head is ready to move independently from the trunk of the body, as well as, the advantageous postural formation of the Bone weight control.
There are the particular parts of the body that an executant had better stabilize during movements, both with arms and legs, and I call them “Anchor parts” (Figure 8). When an executant exerts a strong force or moves at fast speed, the executant had better consider the anchor parts as “the relayed points to transmit force” and have the intention to transmit force from these points to the leading edge of the movement.
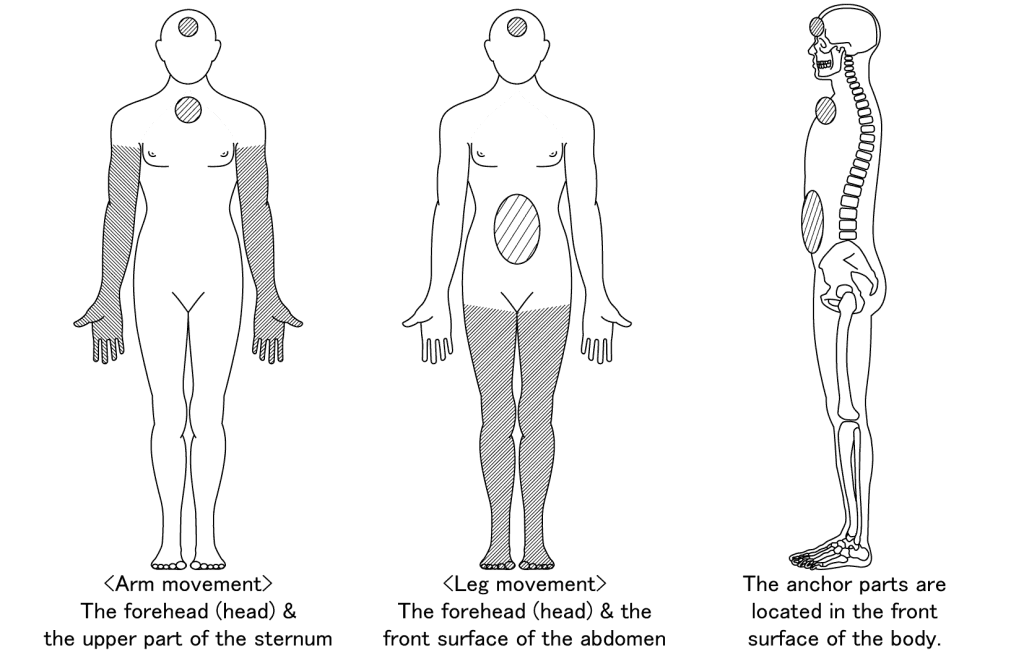
For example, when an executant exerts a certain degree of strong force with an arm, the anchor parts are going to be both the upper part of the sternum and the forehead. The recommended instruction for the executant to practice the action is as follows: “Place the head in the highest position, and turn the forehead moderately forward. With the consideration of transmitting force from both the upper part of the sternum and the forehead, make the leading edge of the arm move.” This instruction is given on the basis of the Bone weight control and the Place-weight base anchoring. The points for an executant to be conscious of when hitting a ball in baseball, and when making a turn in dance are shown in Figure 9. Similarly, we will be able to have instructions like these for many other varying activities.
My recommendation here, as a whole, is an efficient way of supporting the body during movement. What we do in the time of movement is to stop some parts of the body and move other parts of the body, while supporting the body position based on the non-moving parts. We will be able to tailor our movements efficiently by making this segment of our whole movement procedures, which is “to stop some parts of the body and support the body position based on the non-moving parts”.
The useful instruction of consciously practicing this efficient movement of “moving while supporting the body” is to think of “placing one’s body on the floor just as we would place a figurine,” both before and during movement. With this intention, the executant will be able to recognize the force of gravity exerted on their own body, and the executant will be able to balance and make good use of both the loading force of their own weight and the reaction force to stabilize the bones in the axial skeleton. Moreover, because the executant will be able to recall support parts of the body, the executant can make good use of the friction force generated between the support parts of the body and the floor to halt the support parts. I refer this particular way of intention as “Placing”.
Most people tend to pay attention to moving their own body or accomplishing objectives, and do not usually think of the non-moving parts of their body and the activity of supporting their body when they move. Thus, they are likely to end up applying impromptu ways to support the body, such as Impromptu safety involving strong muscular tension. I recommend to the person with Intention advantageous to be aware of this blind spot, referring to the non-moving parts of the body and supporting the body, to some degree simultaneously while he/she moves, and to implement the intention of Placing into practice.
10. Breathing and Vocalizing
An executant is also able to make activities such as speaking, singing, and playing wind instruments, which involve breathing functions, advantageous under the Bone weight control and Place-weight base anchoring (Figure 10).
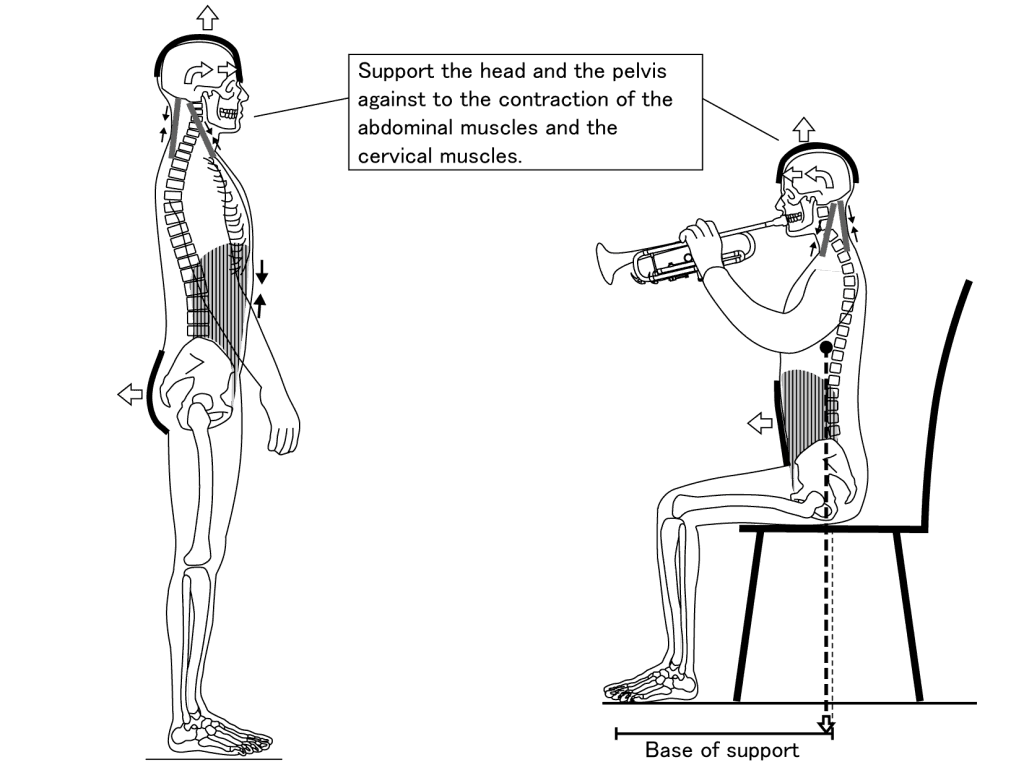
The person with Intention advantageous had better have the intention of Leading edge as well, when such activities may require forced or exaggerated breathing. An instruction for the intention of Leading edge for breathing is as follows: “breathing air out and in from the nose and mouth”, such that it becomes something like a matter of course. This is because “air” corresponds to the edge that the executant moves. On the other hand, if an executant has the intention of “breathing using the abdominal muscles” or “breathing by making the chest move” instead of this simple intention, the executant tends to render the tension exerted on the respiratory muscles in excess. These intentions are the movement intention “moving by using muscles and joints”, which a person in a state of Impromptu safety intends as part of their own habitual pattern. Both the abdomen and the chest move at the time of breathing, but an executant had better think that these movements are carried out automatically.
Instead of having intentions to use muscles and joints, the executant had better consider maintaining a Bone-stand state of the axial skeleton such as the head, the spine, and the pelvis. These bones in the axial skeleton receive traction force by the contraction of the respiratory muscles such as the abdominal muscles during forced breathing, and these bones then becomes easy to be moved to a Bone-slant state. Because muscular tension in a Bone-slant state limits breathing function, maintaining a Bone-stand state through the Bone weight control will be advantageous coping action.
I recommend here a way by which people can consciously make their breath effective and easy. If an executant is able to consciously make their breath effective and easy, the executant gets merits like being able to calm down easily, as well as, burden reduction. Because breathing relates to the way of maintaining body position through the state of the abdominal muscles, the quality of breathing is affected by the executant’s way of maintaining body position. While there are various breathing techniques, the recommended way of breathing here has a unique advantage with regards to tying in the activities of maintaining body position and breathing.
An intention of Leading edge in activities using vocalization becomes something like “speak or sing so that listeners can hear”. This intention here is better than intentions such as “sing at the vocal cords” or “speak putting effort into the abdomen or using the abdominal muscles”. The reason for this is the same as breathing. Furthermore, as activities such as singing, acting, and playing wind instruments, which involve breathing or vocalization, are artistic performances, the purpose of these performances for the executant is to express something abstract such as a scene, feeling, or emotion. Thus, the person with Intention advantageous had better have an intention so as to “convey the scene, feeling, and emotion, which the executant wants to express, to listeners” or simply “vocalize or make the sound that he/she wants to sound” as an intention of Leading edge for these performance activities. If the executant maintains body position adequately with the advantageous way, the functions of the body will work adequately to embody the thought of the executant with this intention.
The person doing these performances in such as music and acting tends to leave the activity of maintaining body position unattended while he/she concentrates their attention on the performance activity itself. However, the person doing these performances had better pay attention to their own way of maintaining body position to some degree because the way of their maintaining body position affects the quality or result of their performance.
11. Body Reaction Under Pressure and Negative Emotion
There are some people who make their body tense and cannot carry out their usual performance under pressure, such as during a public performance, speech, competition, or game. This reaction is referred to as “stage fright”. Such a person, I presume, falls into the way of Impromptu safety with regards to maintaining body position under pressure. It is the idea that the executant unconsciously adopts a way of holding the body while exerting strong muscular tension in order to try to feel a sense of security under the stimulus of psychological pressure. For them the strong muscular tension may be subconsciously perceived as “secure support”.
The person with Intention advantageous had better be aware of one’s self under pressure and particularly intend to “place the body weight on the support parts, and breath out sufficiently” and “check whether the front surface of the abdomen moves, and whether the head is ready to move independently from the trunk”. If an executant practices the Bone weight control and the Place-weight base anchoring for varying activities in everyday life, the executant will be easily able to correct to the advantageous way of maintaining body position, and to carry out their potential performance under pressure. To consciously practice the advantageous body use and breath under psychological pressure is a mental technique for minimizing the adverse effects on performance.
I also presume that some people are easily susceptible to Impromptu safety, when people experience negative emotions such as hostility, fear, anxiety, a threat, or sorrow. Stress (stressors or being stressed) often exists as underlying factor of the negative emotion. Continuing in a state of Impromptu safety increases the risk of adverse effects to the body induced by stress. In order for the executant to reduce such adverse effects on the body, the executant had better intend and practice the advantageous way of maintaining body position. Although the executant, of course, cannot change the external environment causing the stress by practicing it, the executant will be able to control their reaction to the stress in such a way so as to ensure that there are fewer burdens on the body.
12. Advantageous Way of Attention
It is necessary for the person who intends to correct Impromptu safety to pay attention to the own way of maintaining body position and movement. I call this particular attention “Self-use attention”. An executant, of course, needs to pay attention to the fields external to the body or to the purpose of achievement an action, simultaneously. I call this particular attention “External attention”. I presume that to unify both attentions is an advantageous way of attention for an executant to achieve ideal movement and performance.
Although there are the ideas that paying attention to the body or body parts during movement or performance adversely affects the result or quality of the performance[9], Self-use attention does not correspond to this idea, and does not affect performance negatively. Although adding Self-use attention may be felt as a distraction and affect concentration for the person who has adopted only External attention, it is just a temporary feeling. Self-use attention is the attention that affects the result and the quality of an action, and therefore the person with Intention advantageous had better think of this unified way of attention as a new way of concentration.
13. Difference From the Existing Alexander Technique
There is an existing methodology for advantageous use of the body called the Alexander Technique (AT), and it is known as one of the techniques or methods that help people to: improve the condition of their body, relieve chronic pain, relax tension in both physical and psychological respects, and improve performance involving the use of the body.
The reason why AT has a certain effect, I presume, is that a person in a state of Impromptu safety will be able to inhibit its reaction and practice a more advantageous way of body use by its recommended way and instruction. AT recommends: to pay attention to the head in postural formation and movement, to inhibit strong muscular tension of the cervical muscles based on the instruction “Neck free”, to prompt awareness to the use of one’s body, to move with the intention of Leading edge[10], and to move considering the body as whole. In addition, direct leading by way of the instructor’s hand, which is one of the characteristics of instructing AT, helps clients learn the technique.
The ideal state of the use of the body with regards to AT, and the ideal state of the use of the body which I describe and recommend here are the same, in my opinion. In other words, both methods define the state in which an executant maintains their body position and moves with minimum muscular tension, as the ideal state. Nevertheless, there are some differences in terms of ideas on how to use the body and how to instruct clients.
According to my observation and study, there are points lacking and further improvement is needed with regards to the ideas and the instructions of AT. They are the following:
- The ideal posture is not specified objectively in AT so that guiding instructions to achieve it are vague. (ex. “Head forward and up”, “Back lengthen and widen”, “Head moves and all the body follows”)
- It can lead to misunderstandings or misinterpretations when AT instructors simply say “we cannot trust our sensory appreciation”. This is because we are able to use our sensory appreciation for the use of the body if it is appreciated in reproducible way with the objective standard. (ex. Feel the sense of receiving weight at the front side of the body.[11])
- There is little consideration about stabilizing the body during movement in the idea of AT.
- There is no common understanding about the control of the pelvis among AT instructors.
- AT instructions don’t take into account entirely the excess tension on the abdominal muscles and its inhibition.
- AT instructors do not mention enough about consideration of the velocity of movement and the Valsalva maneuver.
- “Non-doing” is not an appropriate expression for instruction because management is required to achieve the ideal condition.
Instructions such as “Inhibition” and “Non-doing” are often used in the existing AT instruction, and AT instructors put emphasis on inhibiting the habitual pattern. Instructions tailored to place such emphasis on inhibition tend to require carefulness for a learner to move, and it can then become difficult for a learner to move or perform decisively based on these instructions. This would happen especially when a learner exerts strong force in their activity or when a learner moves at fast speed. In addition, a learner comes to depend on vague sensory appreciation, partly because the ideal state is not clearly specified by these instructions that emphasize inhibition. Thus, a learner may need more lessons in order to carry out the ideal state by oneself, and a learner may feel anxious as to whether he/she achieves the ideal state by oneself or not.
In the way I recommend here, the ideal state is specified objectively, and it places emphasis on encouraging a learner to intend on the ideal state actively along with inhibition. Because of this, a learner will be able to be more decisive about their movement, and will be less anxious about achieving the ideal state. Thus, I presume that a learner will be able to acquire a satisfactory state by oneself in a shorter time period with this recommended way. Putting it simply, I describe here some conditions we can manage in order to achieve a state of being “Neck free” and recommend a learner to intend to manage them.
Footnotes
[1] The original version was published in July 29, 2014.
[2] The content in this paper is the abstract of my idea. Further details of reasoning and explanation have been written in Japanese.
[3] The adequate state called “Bone-stand state” (Figure 1, A), and it is described later.
[4] Ex. the area of the floor surface covered by the bottom of both soles of the feet in standing position.
[5] Because the activity of keeping the axial skeleton from moving works as a brake, I used the term “brake” for the Excess co-contraction braking. Not only the tension of the abdominal muscles, the back muscles, and the cervical muscles but also the muscular tension around hip joint may excess as well in the state of the Excess co-contraction braking. Muscular tension of the abdominal muscles and the cervical muscles are prominent and easy to detect for the executant in the Excess co-contraction braking.
[6] Couples of forces (or force couples) are possibly generated at the coxal bone in the pelvis or at the cervical spine when in a Bone-slant state.
[7] The sensory appreciation with regards to the body weight can be got through the sensation of muscle contraction and the contact sensation at the support parts.
[8] The appreciation of “sense the body weight at the front side” (not at the back side) has an objective standard (front/back). “Distributing weight through entire soles” (not distributing toward back or front) also has an objective standard.
[9] One hypothesis of the ideas is by Wulf, G. and in his book Attention and Motor Skill Learning (2007).
[10] Some groups of AT instructor have applied the idea of Leading edge in their lesson.
[11] Front or back is simple difference, but it is with an objective standard. “Receiving weight at the front side of the body” will correspond to the appreciation with objective standard in this case.
Bibliography
Alexander, F. M. (1985). Use of the self: Its conscious direction in relation to diagnosis functioning and the control of reaction (Paperback ed.). London, UK: Orion Books. (Original work published 1932).
Higuchi, T. & Morioka, S. (2008). 身体運動学:知覚・認知からのメッセージ [Cognitive science of the body and motor: A message from our perception and cognition]. Tokyo, Japan: Miwa-Shoten.
Husler, F., & Rodd-Marling, Y. (1987). Singing: The physical nature of the vocal organ – A guide to the unlocking of the singing voice (Sunaga, Y., Trans.). Tokyo, Japan: Ongaku No Tomo Sha. (Original work published 1965)
Jones, F. P. (1997). Freedom to change: The development and science of the Alexander technique (3rd ed.). London, UK: Mouritz.
Kapandji, A. I. (2006). Physiologie articulaire: Schémas commentés de mécanique humaine (6th ed., Shiota, E., Trans.). Tokyo, Japan: Ishiyaku Publishers. (Original work published 2005).
Kendall, F. P., McCreary, E. K., & Provance, P. G. (2006). Muscles: Testing and function (4th ed., Kashiwamori, R., Trans.). Tokyo, Japan: Nishimura Company. (Original work published 1993).
Klein-Vogelbach, S. (2012). FBL Klein-Vogelbach Functional kinetics: Die Grundlagen (Nozawa, E., Trans.). Tokyo, Japan: Maruzen Publishing. (Original work published 2007)
Leonard, C. T. (2002). The neuroscience of human movement (Matsumura, M. et al., Trans.). Tokyo, Japan: Ichimura Publishing House. (Original work published 1998).
Lieber, R. L. (2013). Skeletal muscle structure, function, and plasticity: The physiological basis of rehabilitation (3rd ed., Mochizuki, H., Trans.). Tokyo, Japan: Ishiyaku Publishers. (Original work published 2013).
Miyamoto, S. (2008). 脳のなかの身体:認知運動療法への挑戦 [The body in the brain: A challenge through the cognitive therapeutic exercise]. Tokyo, Japan: Kodansha.
Neumann, D. A. (2005). Kinesiology of the musculoskeletal system: Foundations for physical rehabilitation (Shimada, T., Trans.). Tokyo, Japan: Ishiyaku Publishers. (Original work published 2002).
Nolen-Hoeksema, S., Fredrickson, B. L., Loftus, G. R., & Wagenaar, W. A. (2012). Atkinson & Hilgard’s introduction to psychology (15th ed., Uchida, I., Trans.). Tokyo, Japan: Kongo Shuppan. (Original work published 2009).
Otsuki, T., Suzuki, M., Yanagihara, D., Otsuki, T, Kouzaki, M., Takakusaki, K, . . . Masani, K. (2011). 姿勢の脳・神経科学:その基礎から臨床まで [The neuroscience of human posture: from basic to clinical examination]. Tokyo, Japan: Ichimura Publishing House.
Parry, W. D. (2009). Understanding and controlling stuttering: A comprehensive new approach based on the Valsalva hypothesis (2nd ed.). New York, NY: National Stuttering Association.
Tortora, G. J., & Derrickson, B. (2007). Principles of anatomy and physiology (11th ed., Ohno, T. et al., Trans.). Tokyo, Japan: Maruzen Publishing. (Original work published 2006).
Winter, D. A. (2011). Biomechanics and motor control of human movement (4th ed., Nagano, A., & Yoshioka, S., Trans.). Tokyo, Japan: Round Flat. (Original work published 2009).
Wulf, G. (2010). Attention and motor skill learning (Fukunaga, T., Trans.). Tokyo, Japan: Ichimura Publishing House. (Original work published 2007).
Yamashita, N., Tokuhara, Y., Azuma, T., & Ito, T. (2012). 多関節運動学入門 [The essential guide to Kinesiology regarding multijoint human movements] (2nd ed.). Tokyo, Japan: NAP.
Author Biography

Paul Norikazu Aoki, a certified teacher of the Alexander Technique and a member of Japan Alexander Technique Society (JATS), has private practice in Tokyo and Nagoya, Japan. He has taught the Alexander Technique since 2010, and has presented it also at community centers and private guitar school. He has taught it as a trainer of spa massage practitioners of Lush Japan.
Comments
List of comments (2)
[…] “An advantageous way of using our body” April 29th, 2015 https://advantageousintention.com/2017/10/an-advantageous-way-of-using-our-body/.html […]
[…] An Advantageous Way of Using Our Body […]